シミュレーションでの試運転
This content is not available in your language yet.
以下のチュートリアルを通して、シミュレーションでの試運転を行います。
チュートリアルのリスト
-
WMX3Agentを起動
WMX3Agentを起動します。
-
シミュレーションモードに設定
インストール時にSimulationを選択していた場合、このステップはスキップしてください。
そうでない場合、WMX3Agentを起動し、プラットフォーム設定から
Simulationを選択して変更してください。
-
WOSを起動
WMX3Agentを起動し、左側のペインから
Launcherを選択し、ランチャー画面を開きます。 WOSをクリックし、WOSを起動します。WOSは
C:\Program Files\SoftServo\WMX3\WOS\WOS.exeから起動することもできます。
-
通信開始
WOSのエンジンタブが開かれている状態で起動されています。 もしエンジンタブが開かれていない場合、左側ナビゲーターのツリーから
エンジンをクリックして開きます。通信開始ボタンをクリックすると、エンジンは通信状態に遷移します。 エンジンが通信状態のとき、軸やI/Oを制御できます。通信状態がCommunicatingのとき、エンジンは通信状態です。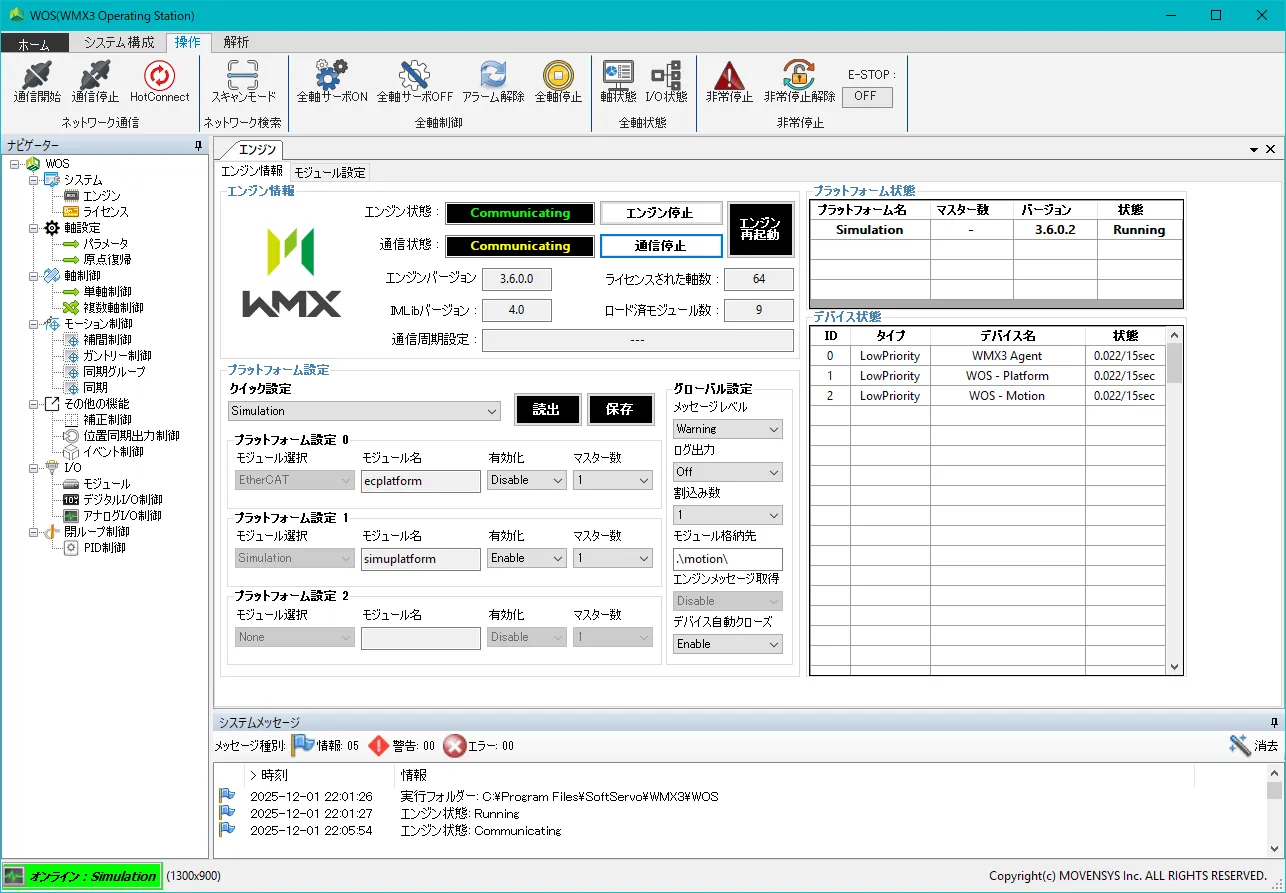
-
サーボオン
左側のナビゲーターツリーから
単軸制御をクリックし、単軸制御タブを開きます。サーボONボタンをクリックすると、緑色に変化し、軸動作状態がIDLEになります。 これでモータを制御できる状態になります。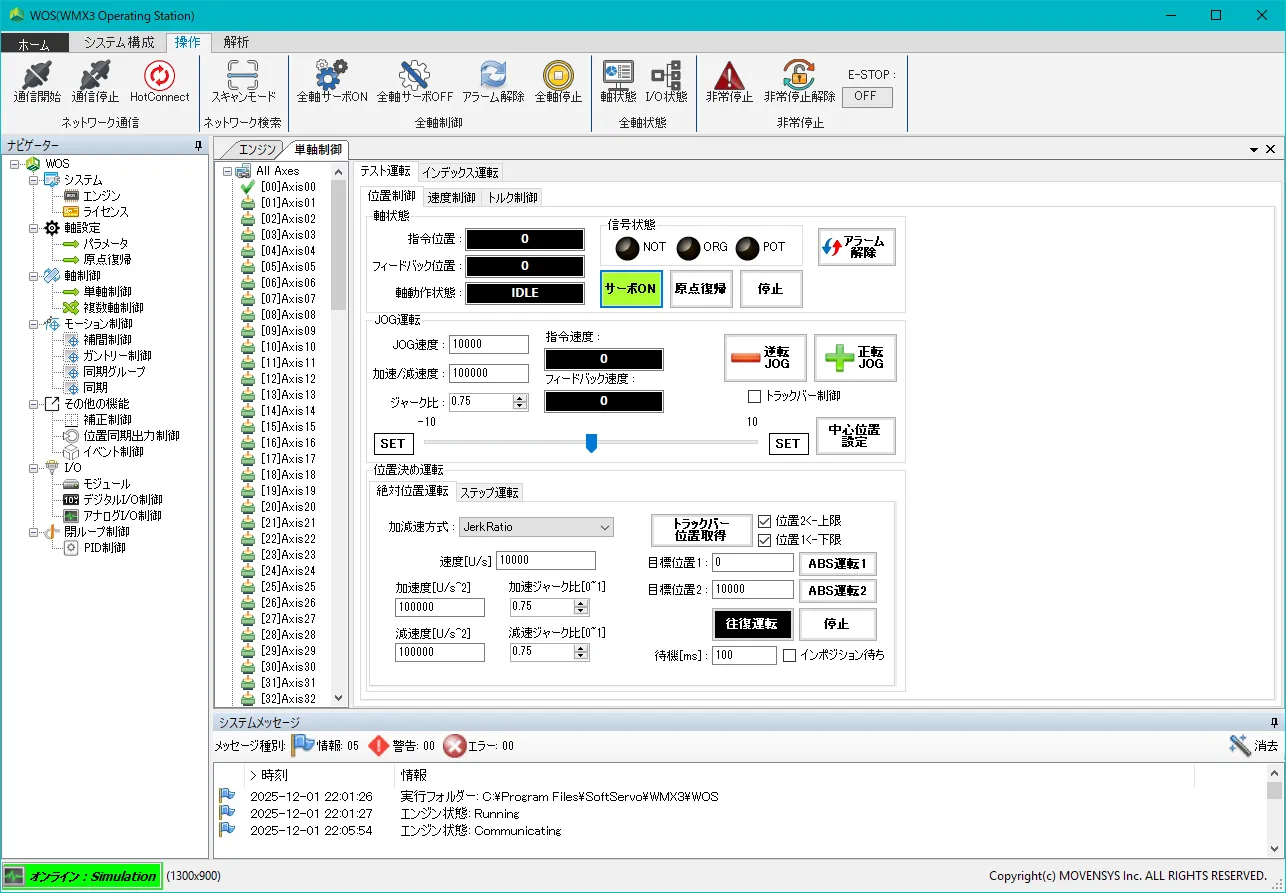
-
JOG運転
正転JOGを長押しします。 すると、押している間は
軸動作状態がJOGになり、指令位置が増加します。 離すとSTOPに遷移し、すぐにIDLEになり、指令位置が止まります。
これでWOSを使って軸を動かすことができました。 次のステップでは、軸の移動を視覚的に確認してみます。